Synchronmaschine
Eine Drehstrom-Synchronmaschine ist eine rotierende elektrische Maschine. Vom Prinzip her kann jede Drehstrom-Synchronmaschine als Motor und Generator betrieben werden. Drehstrom-Synchrongeneratoren dienen in der Energiewirtschaft in einem weiten Leistungsbereich zur Erzeugung von Elektrizität und sind dort unentbehrlich. Drehstrom-Synchronmotoren finden vielseitigen Einsatz als Antriebsmaschinen in der Industrie, aber auch als Antriebe für Fahrzeuge, Schiffe und Züge zum Beispiel.
Die Synchronmaschine trägt ihren Namen wegen der Betriebseigenschaft, dass ihr Läufer exakt mit dem durch die Netzfrequenz vorgegebenen Drehfeld synchron umläuft.[1] Das unterscheidet Synchronmaschinen klar von Asynchronmaschinen, deren Läufer dem Drehfeld im Motorbetrieb nach- und im Generatorbetrieb voreilen. Ein weiteres Unterscheidungsmerkmal ist, dass im Gegensatz zu Asynchronmaschinen für den Betrieb von Synchronmaschinen ein Erregerfeld benötigt wird.[2] Bevor eine Synchronmaschine ans Netz geschaltet wird, muss sie mit dem Netz synchronisiert werden. Im Generatorbetrieb läuft die Maschine allgemein mit relativ konstanter Drehzahl. Synchronmotoren müssen dagegen oft in ihrer Drehzahl variabel sein. Um einen Synchronmotor stufenlos in der Drehzahl regeln zu können, wird Leistungselektronik, wie z.B. Frequenzumrichter, verwendet.[3] Ein Drehgeber (Strichgeber, Resolver) erfasst im Betrieb ständig die Läuferstellungsänderung. Daraus ermittelt die Steuerungselektronik die tatsächliche Drehzahl. Bei Belastung läuft der Läufer des Synchronmotors dem Drehfeld im Winkel geringfügig hinterher (Polradwinkel). Im Generatorbetrieb ist der Polradwinkel positiv in Drehrichtung, eilt also vor. Synchronmaschinen können Blindleistung aufnehmen oder abgeben, dadurch kann die Maschine zudem zur Blindleistungskompensation verwendet werden. Das Blindleistungsverhalten lässt sich über die Erregung beeinflussen.[4]

Geschichte
Die Synchronmaschine kam ab Mitte des 19. Jahrhunderts als Einphasen-Generator zur Versorgung von Beleuchtungsanlagen zum Einsatz. 1887 entwickelten F. A. Haselwander und C. S. Bradley unabhängig voneinander den dreiphasigen Synchrongenerator. Bei den Entwicklungen bildeten sich die Bauformen der Schenkelpol- und Vollpolmaschine aus. Ein Mitbegründer der Brown, Boverie AG, Charles E. L. Brown, gilt als Erfinder des Walzenläufers, mit in Nuten am Umfang verteilter Erregerwicklung. Die Weiterentwicklung der Synchronmaschine hing stark mit dem Ausbau der Energieversorgung und dem Bedarf von immer leistungsstärkeren Generatoren zusammen. Zuerst entstanden Schenkelpol- und Einzelpolmaschinen, da diese geeignet waren, mit den langsamlaufenden Kohledampfmaschinen als Antriebsmaschine, Elektrizität zu erzeugen. Als die Dampfturbinen die Kohledampfmaschinen ersetzten, kamen die schnelllaufenden walzenförmigen Vollpolläufer zum Einsatz. Unabhängig davon wurden in der Industrie schon immer Synchronmaschinen eingesetzt, wenn eine konstante Antriebsdrehzahl oder Phasenschieberbetrieb benötigt wurde.[5][6]
Aufbau

Die Drehstrom-Synchronmaschine besteht aus dem Ständer, auch Stator genannt, und dem Läufer, der auch als Rotor, Polrad und seltener auch als Induktor bezeichnet wird. Im Ständer befindet sich die Ständerwicklung mit ihren drei Wicklungssträngen und im Läufer ist die Erregerwicklung eingebracht. Der Aufbau des Ständers gleicht dem der Drehstrom-Asynchronmaschine. Der Ständer der Synchronmaschine wird auch manchmal Anker genannt und die Ständerwicklung dem entsprechend Ankerwicklung. Der Anker der Synchronmaschine ist aber nicht zu verwechseln mit dem rotierenden Anker von Gleichstrommaschinen.
Die Ständerwicklung besteht aus drei um 120°/p (p=Polpaarzahl) versetzten Wicklungssträngen, die mit U, V und W bezeichnet werden. Sie sind in Stern- oder Dreieckschaltung verschaltet. Über die Ständerwicklung wird im Generatorbetrieb Elektroenergie ins Netz gespeist bzw. im Motorbetrieb bezogen.

Beim Aufbau von Drehstrom-Synchronmaschinen unterscheidet man zwischen Innenpol- und Außenpolmaschinen. Nach dem Aufbau des Läufers werden sie außerdem in Vollpol- und Schenkelpolmaschinen unterschieden. Die Erregerwicklung der Innenpolmaschine ist im Läufer verteilt. Die elektrische Leistung wird über die Ständerwicklung zu- bzw. abgeführt. Bei Außenpolmaschinen befindet sich die Erregerwicklung im Ständer der Maschine und elektrische Leistung wird über die Läuferwicklung zu- oder abgeführt. Die Wicklungen von Generatoren sind für die Höhe der Ströme auszulegen, die bei einem Kurzschluss auftreten. Das betrifft auch die Erregerwicklung, da auch in ihr im Kurzschlussfall hohe Stromspitzen auftreten. Der höchste Kurzschlussstrom tritt bei einem dreipoligen Klemmenkurzschluss auf, wenn sich die Maschine bei Bemessungsdrehzahl im Leerlauf befindet und bei Bemessungsspannung erregt ist. Laut DIN VDE 0530 darf der Kurzschlussstrom maximal das 21-fache des Effektivwerts und das 15-fache des Scheitelwerts des Bemessungsstroms betragen.[7][5]
Bei Innenpolmaschinen sind die Enden der Erregerwicklung über Schleifringe, die sich ebenfalls auf der Läuferwelle befinden, herausgeführt und über Kohlebürsten wird die Erregerspannung an die Erregerwicklung gelegt. Dabei gibt es verschiedene Prinzipien der Erregung, wie z.B. die Erregung mittels Drehstrom-Erregermaschine mit Stromrichtern oder die bürstenlose Erregung über Außenpol-Synchrongeneratoren und mitrotierende Diodengleichrichter (sog. RG-Sätze). Diese Technik wird aber infolge der steigenden dynamischen Anforderungen (Pendeldämpfungsgerät, engl. Power System Stabilizer, PSS) nur noch selten in Kraftwerksneubauten eingesetzt, weil RG-Erregungen wesentlich langsamer als Schleifringerregungen reagieren. Die Erregung ist außerdem mit Permanentmagneten und somit ohne Erregerwicklung möglich. Permanentmagnet-Erregung gewinnt immer mehr an Bedeutung.
Die Enden der Läuferwicklung von Außenpolmaschinen sind ebenfalls über Schleifringe ausgeführt. Bei größeren Leistungen wird die Beherrschung der Zu- bzw. Abführung der Läuferströme schwieriger, so dass man dann Innenpolmaschinen verwendet.[8]

Die Ständerwicklungen und die Erregerwicklung von Synchronmaschinen erwärmen sich im Betrieb durch die auftretenden Ströme. Die Wärme muss abgeführt werden. Im unteren Leistungsbereich geschieht das z. B. über Kühlrippen des Ständers und mittels Lüfter. Dabei zirkuliert die Luft im Gehäuse und um die Wicklungen. Für die Zirkulation ist ein Lüfter auf der Läuferwelle angekuppelt. Möglich ist auch eine Fremdlüftung über einen externen Lüfter. Großgeneratoren erwärmen sich sehr stark. Die Wärme wird hier über eine Wasser- und Wasserstoffkühlung abgeführt. Dabei zirkuliert Deionat durch die als Hohlleiter ausgeführte Ständerwicklung. Anstelle von Luft befindet sich unter Druck stehender Wasserstoff im Gehäuse, das in dem Fall völlig dicht sein und sogar einer Knallgasexplosion standhalten können muss. Aufgrund der großen Wärmeleitfähigkeit von Wasserstoff wird so eine wesentlich bessere Kühlung erreicht als mit Luft. In früher Vergangenheit wurden Prototypen mit supraleitender Erregerwicklung getestet. Ziel der Forschung ist u.a. die Erhöhung der Luftspaltdichte und des Strombelages. Mit der Technik soll ermöglicht werden, die aktive Masse der Maschine bei gleicher Leistung zu halbieren.[5][9][10]
Vollpolmaschinen werden mit hohen Drehzahlen betrieben und eigenen sich deshalb gut zum Einsatz als Turbogeneratoren. Der Läufer dieser Generatoren wird Turboläufer genannt. Sie sind mit wenigen Polpaaren ausgeführt und laufen bei 50 Hz Netzfrequenz mit bis zu 3000 min-1. Aufgrund der hohen Drehzahlen und der auf den Läufer wirkenden Kräfte müssen diese Generatoren schlank gebaut werden und sind wegen der Gefahr einer Überdrehzahl nicht leerlauffähig. Die Baugröße von Vollpolmaschinen ist im Durchmesser durch die Fliehkraftgrenze und in der Länge durch die Durchbiegegrenze begrenzt. Schenkelpolmaschinen werden häufig als niedertourige Generatoren mit großen Durchmessern und geringer Länge eingesetzt. Sie sind mit großer Polpaarzahl ausgeführt und laufen mit 60 bis 750 min-1.[1]
Größere Drehstrom-Synchronmaschinen verfügen über eine Dämpferwicklung (Dämpferkäfig). Bei Vollpolmaschinen sitzt diese in den Nuten der Erregerwicklung oder zwischen diesen Nuten in gesonderten Dämpfernuten. Bei Schenkelpolmaschinen sitzt die Dämpferwicklung in gesonderten Dämpfernuten der Polschuhe. Die Dämpferwicklung bei Vollpolmaschinen ähnelt vom Prinzip her dem Aufbau des Kurzschlussläufers einer Asynchronmaschine.[11]
-
 Läufer einer Schenkelpolmaschine des Hoover-Staudamms bei der Revision (gut zu erkennen, die vielen Pole des Läufers).
Läufer einer Schenkelpolmaschine des Hoover-Staudamms bei der Revision (gut zu erkennen, die vielen Pole des Läufers). -
 Ständer einer Schenkelpolmaschine der französischen Talsperre Barrage de Marèges.
Ständer einer Schenkelpolmaschine der französischen Talsperre Barrage de Marèges. -
 Schleifringe und Kohlebürsten auf dem Läufer eines Synchrongenerators im Kraftwerk Amsteg.
Schleifringe und Kohlebürsten auf dem Läufer eines Synchrongenerators im Kraftwerk Amsteg. -
 Für eine Revision "gezogener" Läufer eines Turbogenerators.
Für eine Revision "gezogener" Läufer eines Turbogenerators.




Anwendung
Hauptanwendungen der Synchronmaschinen sind die Drehstromgeneratoren in Kraftwerken. Fast die gesamte konventionelle Bereitstellung von Elektroenergie erfolgt mit Synchrongeneratoren. In Wärmekraftwerken kommen Vollpolmaschinen mit bis zu einer Leistung von knapp 2000 MVA und Aussgangsspannungen von 21 kV bis 27 kV zum Einsatz. Im Mülheimer Siemens-Werk wurde der weltweit größte Generator für das finnische Kernkraftwerk Olkiluoto gefertigt. Er hat eine Bemessungsscheinleistung von 1992 MVA.[12][13] Die langsamlaufenden Schenkelpolmaschinen in Wasserkraftwerken werden Wasserkraft- oder Hydrogengeneratoren genannt und liefern bei maximal 25 kV Ständerspannung, Leistungen bis zu 1000 MVA. Generatoren kleinerer Leistung von 10 kVA bis 10 MVA kommen in Kleinkraftwerken und Dieselgeneratoren zum Einsatz und sind meist ebenfalls als Schenkelpolmaschine ausgeführt. Synchrongeneratoren für Windkraftanlagen werden zur Zeit mit bis zu 6 MW Leistung gefertigt.[14][15][16] Hinzu kommt der Einsatz bei der Versorgung von lokalen Netzen. So findet der Synchrongenerator auch Verwendung bei der Bereitstellung von Elektroenergie zum Betrieb von Schienenfahrzeugen und Schiffsantrieben sowie wohl zukünftig auch von Straßenfahrzeugen. Eine Sonderbauform der Schenkelpolmaschine bildet die Klauenpolmaschine und kommt vor allem als Kfz-Generator (Lichtmaschine) zum Einsatz.
-
 Schenkelpolgeneratoren des Hoover-Staudamms
Schenkelpolgeneratoren des Hoover-Staudamms -
Maschinenhaus des Walchenseekraftwerks; rechts die AEG-Schenkelpol-Generatoren, links Francis-Turbinen
-
 Moderner Turbogenerator (gelbe zylindrische Einheit in der Mitte); 800 MW; Maschinenhaus Kraftwerk Schwarze Pumpe
Moderner Turbogenerator (gelbe zylindrische Einheit in der Mitte); 800 MW; Maschinenhaus Kraftwerk Schwarze Pumpe -
 Drehstrom-Synchronmotor bei der Montage
Drehstrom-Synchronmotor bei der Montage



Drehstrom-Synchronmotoren großer Leistung dienen als Antrieb für Gebläse, Pumpen und Verdichter sowie teilweise als Bahnantriebe (TGV, AGV). Mit der Möglichkeit, die Drehzahlregelung über Frequenzumrichter vorzunehmen, verdrängte der Synchronmotor große Gleichstrommaschinen, aber auch Gasturbinen zum Antrieb von Turboverdichtern. Im Bereich kleiner und mittlerer Leistung kommen Motoren mit Permanentmagneten für Hilfs- und Fahrzeugantriebe zur Anwendung.[5][1]
Wirtschaftliche Aspekte
Die Wirtschaftlichkeit einer Maschine wird unter anderem durch die Anschaffungs- und Betriebskosten sowie den Wirkungsgrad bestimmt. Der Wirkungsgrad der Synchronmaschine (ca. 95...99% in Abhängigkeit von der Baugröße und der nötigen Erregerleistung) liegt aufgrund der synchronen Strom- und Spannungsphasen generell über dem der Asynchronmaschine. Große Synchronmaschinen, wie z.B. der Turbogenerator, zählen damit zu den effektivsten Energiewandlern. Wegen der Erregereinrichtung der Synchronmaschine ist der Aufbau der Synchronmaschine komplexer, als bei der Asynchronmaschine und damit auch teurer. Der Aufwand für die Steuerelektronik ist ähnlich hoch, wie bei der Asynchronmaschine. Permanentmagneterregte Synchronmaschinen erreichen noch höhere Wirkungsgrade, da ihnen keine Erregerleistung zugeführt werden muss. Bei gleichbleibender Leistung und größerer Leistungsdichte, verringert sich die Masse der Maschinen, bzw. verringert sich die Baugröße. Generatoren dieser Bauart erreichen in Windkraftanlagen einen Wirkungsgrad von über 98% und liegen damit über dem Wirkungsgrad von Maschinen gleicher Größe mit elektrischer Erregung. Permanentmagneterregung kommt nur bei Maschinen kleiner bis mittlerer Baugröße zum Einsatz. Die Kosten für die Magnete fallen bei größeren Maschinen immer mehr ins Gewicht, so dass die Wirtschaftlichkeit gegenüber Maschinen mit elektromagnetischer Erregung nicht mehr gegeben ist. Die komplizierte Montage der Magnete stellt außerdem einen großen Nachteil dar.[17][18][19]
Es gibt diverse Hersteller für elektrische Maschinen und so folgt nur eine Auswahl von Herstellern mit einigen ihrer Produkte im Bereich der Synchronmaschinen:
- ABB - Asea Brown Boveri - Synchronmotoren und -generatoren, BLDC-Servomotoren
- AEM - Anhaltisches Elektromotorenwerk Dessau - Synchrongeneratoren und -motoren
- Leroy-Somer - Antriebstechnik und Generatoren
- Lloyd Dynamowerke - Synchrongeneratoren und -motoren, Hochspannungs-Synchrongeneratoren und -motoren, Schiffsantriebe
- Perm Motor GmbH - permanenterregte Synchronmotoren und -generatoren, BLDC-Motoren für Radantriebe
- Ramme Elektro-Maschinen-Bau GmbH - Torquemotoren, Schiffsantriebe, permanenterregte Synchrongeneratoren
- Siemens - Synchrongeneratoren und -motoren, Bahn-Motoren, permanenterregte Servomotoren
- VA Tech Elin EBG - Synchrongeneratoren und -motoren, Synchron-Bahnmotoren
- VEM Gruppe - Synchrongeneratoren, Hochspannungs-Synchronmotoren, Schiffsantriebe
Vor- und Nachteile
Vorteile:
- hoher Wirkungsgrad
- geringes Massenträgheitsmoment
- wartungsarm (wenn Erregung ohne Schleifringe)
- Drehzahl von Belastung unabhängig
- bei Permanentmagnet-Erregung keine elektrische Leistung für Erregung notwendig
- Relativ großer Luftspalt möglich
- Blindleistungssteuerung möglich
Nachteile:
- teures Material für Permanentmagnete
- hoher Regelaufwand
- kein Selbstanlauf
Betriebsarten
Generatorbetrieb


Damit die Drehstrom-Synchronmaschine als elektrischer Generator, also als Drehstrom-Synchrongenerator arbeiten kann, ist ein Erregerfeld im Läuferkreis notwendig (Innenpolmaschine). Das heißt, durch eine gleichstromerregte Läuferwicklung (Erregerwicklung) oder einen Permanentmagnet muss ein magnetisches Feld (Erregerfeld) erzeugt werden, das in den Strängen der Ständerwicklung eine Ständerspannung induziert. Die Stränge der Ständerwicklung sind zum Stern verkettet. Man erhält an den Generatorklemmen (Enden der Stränge U, V, W) eine Dreiphasenwechselspannung, also drei um 120° phasenverschobene Wechselspannungen. Die Ständerstrangspannung (auch Klemmenspannung genannt) lässt sich mit Kenntnis der synchronen Reaktanz , dem Ständerstrom und der Polradspannung wie folgt berechnen:





Bei der Verwendung einer Erregerwicklung muss zur Erzeugung des Erregerfeldes Erregerleistung zugeführt werden. Dazu gibt es verschiedene Erregersysteme, beispielsweise die statische Erregereinrichtung oder die bürstenlose Erregereinrichtung. Um bei plötzlichen Lastabwurf Schäden am Generator zu vermeiden, ist bei größeren Maschinen eine eigene Entregungsschaltung vorgesehen.
Die Anzahl der Polpaare der Erregerwicklung ist ausschlaggebend für die Bemessungsdrehzahl des Generators und ist wie folgt definiert:

- (die 60 dient dazu, die berechnete Drehzahl auf eine Minute zu beziehen)

So laufen ein zweipoliger () Generator mit 3000 min−1 und ein vierpoliger () Generator mit 1500 min−1 bei einer Frequenz der Ständerspannung von 50 Hz. Außerdem ist eine an die Generatorwelle angekuppelte Arbeitsmaschine notwendig, wie z. B. ein Verbrennungsmotor oder eine Turbine, die den Läufer mit dem Erregerfeld rotatorisch antreibt. Das bedeutet, die Arbeitsmaschine führt dem Generator mechanische Leistung zu, die der Generator in elektrische Leistung wandelt. Die zugeführte mechanische und die abgegebene elektrische Wirkleistung erhält man rechnerisch wie folgt:


- , mit der Kreisfrequenz (Drehzahl in Umdrehungen pro Sekunde) und dem durch die Antriebsmaschine zugeführten Drehmoment
- , mit dem Verkettungsfaktor , der Ständerspannung , dem Ständerstrom und dem Leistungsfaktor







Werden die Verluste vernachlässigt, gilt Pmech = Pel. Beim realen Generator treten jedoch Hysterese- und Stromwärmeverluste sowie Reibungsverluste auf. Setzt man die zugeführte mechanische Leistung und die abgeführte elektrische Leistung ins Verhältnis, erhält man den Wirkungsgrad der Maschine, der immer kleiner 1 (bzw. 100 %) ist.


Zusammenfassung der Wirkungsweise:
- Generator befindet sich mit Bemessungsdrehzahl im Leerlauf
- die Netzschaltung des Generators findet statt, wenn alle Synchronisationsbedingungen hergestellt sind
- über die Antriebsmaschine wird mechanische Leistung zugeführt
- der Generator würde dadurch beschleunigen, doch bildet sich durch die Belastung der elektrischen Verbraucher im Netz ein Gegenmoment aus, das dem Moment der Arbeitsmaschine entgegenwirkt
- es fließt ein Dreiphasenwechselstrom (Ständerstrom )
- der Ständerstrom verursacht eine Differenzspannung an der synchronen Reaktanz (induktiver Blindwiderstand der Ständerwicklung; ohmscher Widerstand vernachlässigt)
- durch den Spannungsabfall an bildet sich ein vom Ständerstrom abhängiger Polradwinkel ט aus, der im Generatorbetrieb immer positiv in Drehrichtung ist
- in Folge dessen verschiebt sich die Polradspannung zur festen Netzspannung (gegenüber dem Leerlauf) mit dem Winkel des Polrades in Drehrichtung
- bei konstanten Momenten bilden sich ein Gleichgewicht und ein konstanter Polradwinkel aus und die synchrone Drehzahl bleibt erhalten; schwankende Belastungen im Netz können dieses Gleichgewicht stören


Die Ständerspannung ist lastabhängig. Bei konstantem Erregerstrom und konstanter Drehzahl ergeben sich verschiedene Kennlinienverläufe für kapazitive, induktive und ohmsche Lasten. Mit kapazitiver Last ergibt sich eine Spannungsüberhöhung, für ohmsche Last ergibt sich ein schwacher Abfall und für induktive Last ein starker Abfall der Ständerspannung. Um die Ständerspannung konstant zu halten, muss also der Erregerstrom entsprechend der Last geregelt werden. Die Regulierkennlinie stellt dar, wie der Erregerstrom entsprechend den verschiedenen Lasten geregelt werden muss. Induktive Last bedarf einer starken und ohmschen Last einer schwachen Erhöhung des Erregerstroms. Um der starken Erhöhung der Ständerspannung bei kapazitiver Last entgegenzuwirken, muss der Erregerstrom stark gesenkt werden. [20][4][21]


-
 Ständerspannung bei konstanter Drehzahl und konstantem Erregerstrom
Ständerspannung bei konstanter Drehzahl und konstantem Erregerstrom -
 Regulierkennlinie im Inselbetrieb für konstante Klemmenspannung
Regulierkennlinie im Inselbetrieb für konstante Klemmenspannung


Synchrongeneratoren können bei asynchroner Netzschaltung Schaden nehmen, wenn keine Sicherheitseinrichtungen wirken. Eine Fehlsynchronisation eines Generators hat Ausgleichsströme zur Folge, die wiederum Drehmomente nach sich ziehen. Kleine Fehlsynchronisationen und damit verbundene Pendelungen (verursacht durch die Drehmomente) dämpft die Dämpferwicklungen. Große Fehlsynchronisationen führen zu Schäden am Generator, da die damit verbundenen großen Drehmomente auf die Maschine und das Maschinenfundament wirken. Soll ein Generator Energie in ein Verbundnetz speisen, so sind vor einer Synchronisation Synchronisations- oder auch Parallelschaltbedingungen zu erfüllen:
- gleiche Höhe der Netz- und Generatorspannung
- gleiche Frequenz der Netz- und Generatorspannung
- gleiche Phasenlage
- gleiche Phasenfolge
Für die Synchronisation stehen verschiedene Geräte und Schaltungen zur Verfügung (Hell- oder Dunkelschaltung, Synchronoskop), jedoch wird heute meist auf die automatische Synchronisation durch digitale Steuerungstechnik vertraut. Der Generator wird nach Herstellung der Synchronisationsbedingungen im Leerlauf ans Netz geschaltet und kann danach elektrisch belastet werden, also elektrische Leistung abgeben.[22][3][23]
Motorbetrieb
Für den Motorbetrieb ist wie beim Generatorbetrieb auch eine erregte Läuferwicklung (Erregerwicklung) oder ein Permanentmagnet notwendig, um ein Erregerfeld zu erzeugen. Außerdem muss über die Ständerwicklungen Elektroenergie zugeführt werden, damit der Drehstrom-Synchronmotor ein Drehmoment an der Welle abgeben kann. Die aufgenommene elektrische Leistung berechnet sich wie folgt:
- , mit dem Verkettungsfaktor , der Ständerspannung , dem Ständerstrom und dem Leistungsfaktor

Die abgegebene mechanische Leistung entspricht der aufgenommenen elektrischen Leistung, abzüglich dem Verlustleistungsanteil , welcher aus Kupfer- und Eisenverlusten sowie aus Reibungsverlusten besteht.

- , mit der Kreisfrequenz (Drehzahl in Umdrehungen pro Sekunde) und dem durch die Arbeitsmaschine abgeforderten Drehmoment
Das Verhältnis von abgegebener mechanischer Leistung zu aufgenommener elektrischer Leistung drückt den Wirkungsgrad der Maschine aus.
Das vereinfachte Ersatzschaltbild der Synchronmaschine ist im Abschnitt Generatorbetrieb zu finden. Im Artikel Drehstrommaschine ist das Antriebsprinzip durch ein Drehfeld beschrieben, welches sowohl für Synchron-, als auch Asynchronmotoren gilt.

Zusammenfassung der Wirkungsweise:
- die Synchronmaschine befindet sich im Leerlauf am starren Netz
- es erfolgt eine Belastung an der Motorwelle durch eine Arbeitsmaschine
- der Motor würde seine Drehzahl verringern, doch nimmt der Motor nun elektrische Leistung auf und der Ständerstrom steigt an
- es wirkt nun ein Motormoment, das dem Lastmoment entgegen wirkt
- der Ständerstrom verursacht eine Differenzspannung an der synchronen Reaktanz (induktiver Blindwiderstand der Ständerwicklung; ohmscher Widerstand vernachlässigt)
- durch den Spannungsabfall an bildet sich ein vom Ständerstrom abhängiger Polradwinkel ט aus, der im Motorbetrieb entgegen der Drehrichtung wirkt
- in Folge dessen verschiebt sich die Polradspannung zur festen Netzspannung (gegenüber dem Leerlauf → Leerlaufzeigerbild siehe Generatorbetrieb) mit dem Winkel des Polrades entgegen der Drehrichtung
- der Motor läuft mit synchroner Drehzahl weiter; es entsteht kein Schlupf wie beim Asynchronmotor[24]
Synchronmotoren mit geringer Dämpfung laufen nicht allein an. Der Läufer eines Synchronmotors besitzt in der Regel ein zu großes Massenträgheitsmoment, um dem Drehfeld aus dem Stillstand zu folgen. Deshalb muss die Motordrehzahl unbelastet in die Nähe der Drehfelddrehzahl gebracht werden. Dann wird die Erregung zugeschaltet und der Läufer des Motors wird in den synchronen Lauf gezogen. Danach kann der Motor belastet werden. Für den Anlauf stehen verschiedene Verfahren zur Verfügung:
- Anwurfmotor: Ein angekuppelter Anwurfmotor (auch Anlaufmotor) bringt die Drehzahl des Synchronmotors in die Nähe der Drehfelddrehzahl. Nach erfolgter Synchronisation wird der Anwurfmotor abgekuppelt.
- Asynchron-Anlauf durch zusätzlichen Dämpferkäfig im Läuferkreis: Durch den Dämpferkäfig kann der Synchronmotor nach dem Prinzip der Asynchronmaschine anlaufen. Erreicht die Motordrehzahl nach Zuschalten der Erregung die Drehfelddrehzahl, verliert der Dämpferkäfig seine Wirkung als Anlaufkäfig und der Motor läuft als Synchronmaschine weiter. Beim Hochlauf ist die Erregerwicklung zumeist über einen Widerstand kurzgeschlossen, um die Induktion hoher Spannungen zu vermeiden und um das Hochlaufmoment zu erhöhen.
- Frequenzanlauf: Die Frequenz der Speisespannung wird von Null bis zur Bemessungsfrequenz oder der daraus resultierenden Bemessungsdrehfelddrehzahl kontinuierlich gesteigert. Ein veraltetes Verfahren dazu stellt die Frequenzwandlung mittels vorgeschalteten Asynchrongenerators dar. Die Frequenz der abgegebenen Spannung des Generators wird über die zugeführte Drehzahl oder seinen Schlupf gesteigert. Heute werden leistungselektronische Umrichter zum Frequenzanlauf genutzt. Mit diesem Verfahren ist auch ein Lastanlauf möglich.[6][23]
Betrieb mit Dämpferwicklung (Dämpferkäfig)
Die wichtigste Aufgabe der Dämpferwicklung von Synchronmaschinen besteht darin, mechanische Pendelmomente zu dämpfen. Pendelmomente treten auf durch Asynchronbetrieb, an die Synchronmaschine angekuppelte Maschinen mit periodischem Drehmoment (z.B. Verbrennungsmotoren als Antriebsmaschine oder Kolbenkompressoren als Arbeitsmaschine) und Laststöße. Im unsymmetrischen Betrieb (Schieflast) und im Extremfall bei Einphasenbetrieb tritt ein inverses Drehfeld auf, das ebenfalls gedämpft wird. Unbedämpft hätte das inverse Drehfeld hohe Verluste zur Folge.
Für den Generatorbetrieb ist vor allem die Dämpfung der inversen Felder von Bedeutung. Inverse Felder verursachen einen Strom in der Dämpferwicklung, dessen Frequenz doppelt so groß wie die Netzfrequenz ist. Die Dämpferwicklung wird hierbei mit geringem Widerstand ausgeführt, um die Verluste gering zu halten.
Im Motorbetrieb sind vor allem Pendelmomente zu dämpfen. Bei Belastung mit einem konstanten Lastmoment besteht unter einem konstanten Polradwinkel ein Gleichgewicht zwischen dem durch die Last abgeforderten und dem durch die Maschine zugeführten Drehmoment (siehe auch Federmodell des Polradwinkels einer Synchronmaschine). Durch plötzliche Erhöhung des Lastmomentes (Laststoß) verzögert sich wegen des Massenträgheitsmoments des Läufers seine Drehbewegung über den Polradwinkel hinaus. Das Lastmoment ist nun kleiner als das Motormoment und das verursacht wiederum durch das Massenträgheitsmoment eine Beschleunigung bis zu einem zu geringen Polradwinkel. Dieses Pendeln wiederholt sich mit immer kleiner werdender Amplitude bis wieder ein Gleichgewicht erreicht ist. Durch die Relativbewegung zwischen Ständer und Läufer wird nach dem Prinzip der Asynchronmaschine ein Drehmoment erzeugt, welches den Pendelbewegungen entgegen wirkt. Ähnlich wirken ebenfalls Massivteile des Läufers, wie der massive Läuferballen der Vollpolmaschine oder die massiven Polschuhe der Schenkelpolmaschine. Das heißt, eine gewisse Dämpfung kann auch ohne Dämpferwicklung stattfinden. Neben dem Dämpfen von Pendelmomenten kann die Dämpferwicklung auch zum Selbstanlauf nach dem Prinzip des Asynchronmotors mit Käfigläufer dienen.[11][23]
Phasenschieberbetrieb

Als Phasenschieberbetrieb wird eine Betriebsart der ans Netz synchronisierten Synchronmaschine bezeichnet, bei der ausschließlich Blindleistung aus dem Netz bezogen oder in das Netz abgegeben wird. Die Synchronmaschine wird im Leerlauf betrieben. Durch Erhöhen oder Absenken des Erregerstroms (Übererregung, bzw. Untererregung; siehe V-Kurve) wird die Höhe der ans Netz abgegebenen, bzw. aus dem Netz aufgenommenen Blindleistung beeinflusst. Bei Übererregung wird induktiver Blindstrom abgegeben (Verhalten wie Kondensator) und untererregt nimmt die Synchronmaschine Blindstrom auf (Verhalten wie Spule). Die Synchronmaschine dient somit der Blindleistungskompensation in elektrischen Netzen. In der Regel wird eine Synchronmaschine im Phasenschieberbetrieb übererregt betrieben, da Energienetze meist mehr durch induktive, als durch kapazitive Verbraucher belastet werden. Energienetze nehmen kapazitiven Charakter durch Leitungskapazitäten an, wenn kaum Verbraucher am Netz sind. Das ist z. B. Nachts der Fall, wenn große Teile der Industrieanlagen vom Netz gegangen sind. Synchronmotoren, die rein zum Phasenschieberbetrieb dienen, werden in der Nähe von Anlagen installiert, deren Blindleistung zu kompensieren ist. Der Nutzen der Blindleistungskompensation liegt darin, dass die Leitungen des Netzes die Blindströme nicht tragen müssen, wenn diese schon in der Nähe der Anlage kompensiert werden.[25][26]
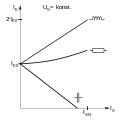
V-Kurve

Betreibt man eine Synchronmaschine mit konstanter Netzspannung im Phasenschieberbetrieb, so lassen sich die nach ihrer Kurvenform benannten V-Kurven aufnehmen. Ändert man bei verschiedenen konstanten Wirkleistungen den Erregerstrom und erregt damit die Synchronmaschine über, bzw. unter und trägt man die sich ergebenen Ständerströme auf, so erhält man die charakteristischen V-Kurven. Die mit Wirkstrom belastete Synchronmaschine kann zusätzlich so viel aus der Über- bzw. Untererregung folgenden Blindstrom übernehmen, bis der Bemessungsstrom erreicht ist.

Im Bild sind fünf Kurven mit den Minima P0 bis zu P4 zu sehen und ergeben sich bei den verschiedenen Wirk- zu Bemessungsleistungsverhältnissen PS/PN. In den Minima der Kurven wird nur Wirkleistung umgesetzt. Links und rechts davon zusätzlich Blindleistung. Bei der Kurve mit dem Minima P0 handelt es sich um reinen Phasenschieberbetrieb. Es wird keine Wirkleistung umgesetzt.
Beim Erreichen der Stabilitätsgrenze fällt die Maschine im Motorbetrieb außer Tritt, bzw. geht im Generatorbetrieb durch.[25][26]
Stromortskurve

Aus dem vereinfachten Ersatzschaltbild (RS=0; siehe Generatorbetrieb) folgt die Formel für die Ständerspannung:

Daraus lässt sich der Ständerstrom ableiten:

In der Ortskurve liegt der Zeiger der Ständerspannung in der reellen Achse (Re). Um die Spitze des Zeigers ergibt sich ein Kreis mit dem Radius von . Dieser Radius ist wegen variabel, so dass sich eine konzentrische Schar von Stromortskurven für Synchronmaschine ergibt. Bei ergibt sich ein Erregergrad von . Der sich ergebene Kreis geht durch den Ursprung des Im-Re-Koordinatensystems.[27]





Charakteristische Punkte und Bereiche:
- : Ortskurve wird zu einem Punkt
- : untererregter Betrieb
- sowie : übererregter Betrieb
- : Phasenschieberbetrieb
- : stabiler Generatorbetrieb
- : stabiler Motorbetrieb







Feldwelle im Luftspalt

Um das Funktionsprinzip einer Synchronmaschine besser verstehen zu können, sollte man die Feldwelle im Luftspalt betrachten. Das nebenstehende Bild zeigt eine zweipolige Synchronmaschine (2 Magnete, ein Nordpol, ein Südpol) mit einer dreiphasigen Einlochwicklung (6 Stränge, 6 Nuten). Die Maschine befindet sich im Leerlauf.
Die x-Achse (0° bis 360°) verläuft im Luftspalt und steht für den Rotorumfang (der hier, um sich nicht auf einen bestimmten Radius festlegen zu müssen, in Graden angegeben wird). Die y-Achse zeigt nach oben und gibt den Wert für die magnetische Flussdichte in Tesla (T) in Abhängigkeit von und an. Die z-Achse beschreibt den Drehwinkel von 0° (entspricht im Bild R1) bis 180° (entspricht im Bild R31), also einer halben Umdrehung.



Deutlich zu sehen ist die Wirkung der beiden Magnete, die zunächst ein etwa trapezförmiges Feld von 10° bis 170° bzw. von 190° bis 350° erzeugen. Die mittlere Breite dieses Trapezes (etwa 140°) entspricht in etwa der Breite des Magneten. Dieses Trapez ist unabhängig von dem Drehwinkel (z-Achse) immer vorhanden.
Die schrägen „Rillen“ werden von den Nuten erzeugt: Dort, wo die Nut gerade ist, ist der Luftspalt größer und stellt für den magnetischen Fluss einen größeren Widerstand dar, die Flussdichte ist an dieser Stelle geringer. Da sich die Nuten am Magneten vorbeidrehen, erscheint die Rille im Diagramm schräg. Verfolgt man eine Rille von bis , wird man feststellen, dass sie auch auf der x-Achse genau 180° durchläuft.


Um nun ein Drehmoment zu erzeugen, muss in den Nuten, die genau unter den Magneten sind, ein Strom fließen. Nach dem Prinzip der Lorentz-Kraft

{kind=link}
wird dann das Moment erzeugt.
Um das maximale Moment zu erzeugen (das gleichzeitig das Kippmoment ist), muss der in der Regel sinusförmige Strombelag in Phase mit der Feldwelle sein.[28][29]
Geltende DIN-Normen und DIN VDE-Vorschriften
- DIN VDE 0530 Teil 1 bis 18, bzw. entsprechende Teile der DIN EN 60 034 oder IEC 34
- DIN ISO 1940-1 - Anforderungen an die Auswuchtgüte starrer Rotoren; Bestimmung der zulässigen Restunwucht
- DIN ISO 7919-... - Mechanische Schwingungen von Maschinen mit Ausnahme von Kolbenmaschinen - Messung und Bewertung von Wellenschwingungen
- DIN ISO 8821-... - Mechanische Schwingungen Vereinbarung über die Passfeder - Art beim Auswuchten von Wellen und Verbundteilen
- DIN ISO 10816-...- Mechanische Schwingungen - Bewertung von Schwingungen von Maschinen durch Messungen an nicht-rotierenden Teilen
für ex-geschützte Bereiche kommen gesonderte Normen hinzu:
- DIN VDE 0165 - Errichten elektrischer Anlagen in explosionsgefährdeten Bereichen
- DIN VDE 0166 - Errichten elektrischer Anlagen in durch explosionsgefährliche Stoffe gefährdeten Bereiche
- DIN EN 50014 - Elektrische Betriebsmittel für explosionsgefährdete Bereiche; Allgemeine Bestimmungen
- DIN EN 50016 - Elektrische Betriebsmittel für explosionsgefährdete Bereiche; Überdruck-Kapselung ”p”
- DIN EN 50019 - Elektrische Betriebsmittel für explosionsgefährdete Bereiche; Erhöhte Sicherheit ”e”[30][31]
Literatur
- Peter-Klaus Budig: Stromrichtergespeiste Synchronmaschine. Theorie und Anwendungen. VDE-Verlag, Berlin 2003, ISBN 3-8007-2518-5.
Weblinks
- Synchrongenerator (Schenkelpolläufer) für Bordnetzanwendungen (5kVA)
- Java-Animationen zu verschiedenen Maschinentypen (von Georg Andresen)
- Video eines 2-poligen Läufers einer Innenpolmaschine
{kind=link}
Einzelnachweise
- ↑ a b c Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 131 (PDF 2,8 MB).
- ↑ Rolf Fischer: Elektrische Maschinen. 14. Auflage. Carl Hanser Verlag, München 2007, ISBN 978-3-446-41754-0, S. 291 ff. (aktualisierte und erweiterte Auflage).
- ↑ a b Rolf Fischer: Elektrische Maschinen. 14. Auflage. Carl Hanser Verlag, München 2007, ISBN 978-3-446-41754-0, S. 324 ff. (aktualisierte und erweiterte Auflage).
- ↑ a b Rolf Fischer: Elektrische Maschinen. 14. Auflage. Carl Hanser Verlag, München 2007, ISBN 978-3-446-41754-0, S. 313 ff. (aktualisierte und erweiterte Auflage).
- ↑ a b c d Rolf Fischer: Elektrische Maschinen. 14. Auflage. Carl Hanser Verlag, München 2007, ISBN 978-3-446-41754-0, S. 287 ff. (aktualisierte und erweiterte Auflage).
- ↑ a b Germar Müller, Bernd Ponick: Grundlagen elektrischer Maschinen. 9. Auflage. Wiley-VCH, Berlin 2006, ISBN 3-527-40524-0, S. 485 ff. (völlig neu bearbeite Auflage).
- ↑ Hans-Ulrich Giersch: Elektrische Maschinen. 5. Auflage. Teubner Verlag, 2003, ISBN 3-519-46821-2, S. 331.
- ↑ Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 132–134 (PDF 2,8 MB).
- ↑ Germar Müller, Bernd Ponick: Grundlagen elektrischer Maschinen. 9. Auflage. Wiley-VCH, Berlin 2006, ISBN 3-527-40524-0, S. 583 (völlig neu bearbeite Auflage).
- ↑ Technische Universität Darmstadt (Hrsg.): Supraleitung in der elektrischen Energietechnik. S. 1–4 (PDF 4.1 MB).
- ↑ a b Germar Müller, Karl Vogt, Bernd Ponick: Berechnung elektrischer Maschinen. Elektrische Maschinen. 6. Auflage. Band 2. Wiley VCH, 2007, ISBN 3-527-40525-9, S. 170–172 (völlig neu bearbeitete Auflage).
- ↑ Stefan Güllenstern: Anforderungen bei der Bearbeitung von Dampfturbinen. Hrsg.: Siemens AG. 2007 (PDF 2.15MB [abgerufen am 2011-1-3]).
- ↑ Robert Gerlings: Abschied von 900 Tonnen. Siemens liefert größten Generator der Welt aus. Hrsg.: WAZ. 2008-9-22 (HTML [abgerufen am 2011-1-3]).
- ↑ VEM Sachsenwerk GmbH (Hrsg.): VEM Lieferumfang. (HTML [abgerufen am 2011-1-3]).
- ↑ Bundesverband WindEnergie (Hrsg.): Drehzahlvariable Windkraftanlage mit Synchrongenerator. (HTML [abgerufen am 2011-1-3]).
- ↑ Deutsches Museum (Hrsg.): Windkraft-Technologien. (HTML [abgerufen am 2011-1-3]).
- ↑ Henning Wallentowitz, Arndt Freialdenhoven, Ingo Olschewski: Strategien zur Elektrifizierung des Antriebstranges. 2. Auflage. Vieweg+Teubner Verlag, 2009, ISBN 3-8348-0847-4, S. 81.
- ↑ Erich Hau: Windkraftanlagen. 4. Auflage. Springer-Verlag, 2008, ISBN 3-540-72150-9, S. 356, 362.
- ↑ Germar Müller, Bernd Ponick: Grundlagen elektrischer Maschinen. 9. Auflage. Wiley-VCH, Berlin 2006, ISBN 3-527-40524-0, S. 580 (völlig neu bearbeite Auflage).
- ↑ Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 166 (PDF 2,8 MB).
- ↑ N. Klaes: 5.1. Aufbau Synchronmaschine. Hrsg.: Fachhochschule für Technik und Wirtschaft Berlin. S. 151, 161–168 (PDF 2.21 MB [abgerufen am 2011-1-5] LV Elektrische Antriebe 1).
- ↑ N. Klaes: 5.1. Aufbau Synchronmaschine. Hrsg.: Fachhochschule für Technik und Wirtschaft Berlin. S. 169 ff. (PDF 2,21 MB [abgerufen am 2011-1-5] LV Elektrische Antriebe 1).
- ↑ a b c Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 172 ff. (PDF 2,8 MB).
- ↑ Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 131, 167 (PDF 2,8 MB).
- ↑ a b Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 169 ff. (PDF 2,8 MB).
- ↑ a b N. Klaes: 5.1. Aufbau Synchronmaschine. Hrsg.: Fachhochschule für Technik und Wirtschaft Berlin. S. 161–169 (PDF 2,21 MB [abgerufen am 2011-1-5] LV Elektrische Antriebe 1).
- ↑ Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven (Hrsg.): Detaillierte Darstellung der Synchronmaschine. S. 163 (PDF 2,8 MB).
- ↑ Rolf Fischer: Elektrische Maschinen. 14. Auflage. Carl Hanser Verlag, München 2007, ISBN 978-3-446-41754-0, S. 297 (aktualisierte und erweiterte Auflage).
- ↑ Germar Müller, Karl Vogt, Bernd Ponick: Berechnung elektrischer Maschinen. Elektrische Maschinen. 6. Auflage. Band 2. Wiley VCH, 2007, ISBN 3-527-40525-9, S. 195 ff. (völlig neu bearbeitete Auflage).
- ↑ http://www.vem-group.com/mediadb/pdf/dm.pdf PDF (65,4 kB) Memo zu Drehstrom-Synchronmotoren 800 bis 40.000 kW der VEM Gruppe
- ↑ Hrsg. v. Komitee 311: Drehende elektrische Maschinen: Erläuterungen zu DIN EN 60034 (VDE 0530), Band 10, 7. Auflage. VDE Verlag, 2004, ISBN 3-8007-2848-6.